本文介绍多目标跟踪中二分图匹配的匈牙利算法与KM算法。先解释完美匹配、二分图、最大匹配、交错路径等概念,以男女配对为例,演示匈牙利算法流程:通过匹配与寻找增广路径交替操作实现最大匹配,并附代码及输入输出说明,展示算法如何解决二分图无权匹配问题。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
目标检测任务是计算机视觉中的核心问题之一,而不同目标检测模型的性能很大程度上取决于损失函数的设计。以YOLO系列举例,一般YOLO系列的输出头都包含Regression和Classification两部分。
故以YOLO系列为例,目标检测的损失就包含了三部分,而今天要介绍的SIoU则属于第一类损失,回归框损失 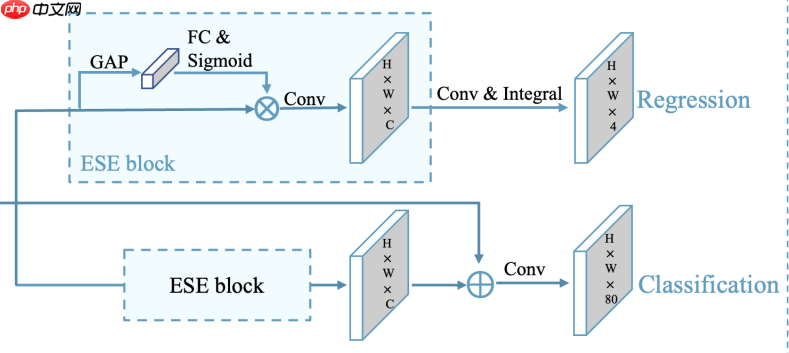
正如标题所说,SIoU是一种对于目标框回归有更强大学习能力的损失函数,但其表现的强大在哪呢,要先回顾一下传统的GIOU和CIOU。
传统的回归框损失主要从三个方面进行考虑,即两框的重叠区域,两框之间的距离和两框的长宽比例。(上面说的两框均值真实框与预测框)
重叠区域的表示:大部分算法都以IOU的形式来表达,即通过计算真实框与预测框之间的交集和并集的比来表示。即下图黄色面积和蓝色面积的比值来表示IOU。
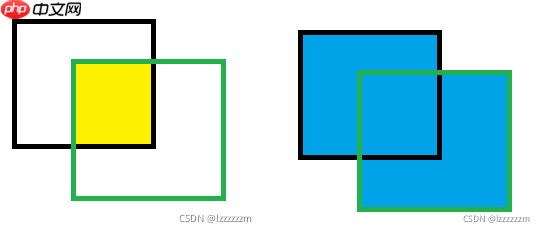
但上图所表示的IOU,最大的问题在于没有办法解决两框没有交集的情况,而这其实在目标检测的训练中是常常出现的。所以就有了GIOU的表示方法。
GIOU引入了两个方框中最小外接矩形的概念,来解决两个方框不相交的问题。
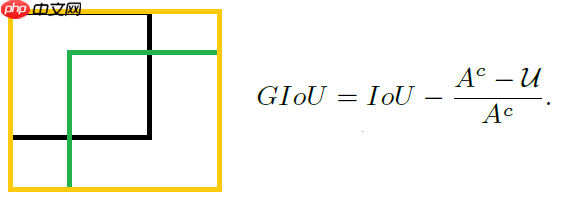
上式中Ac为下图黄色框的面积,u为两框相交的面积。
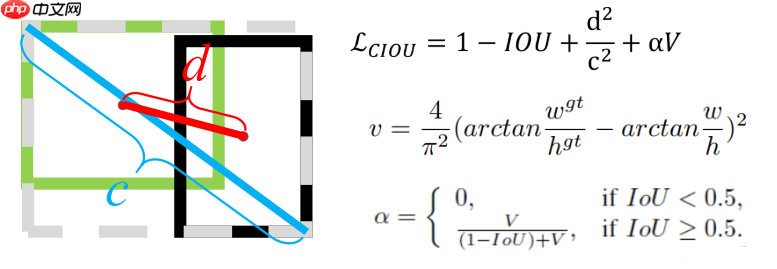
两框之间距离表示: 在CIoU的设计里,作者考虑到了两个目标框距离对收敛的影响性,所以通过两框中心之间的距离和两框对角线距离之比来衡量两个框之间的距离。
两框长宽比例表示: 在上述公式中,还有aV一项,其通过计算两框长宽之比的差来表示(arctan设计用于在反向传播求导时,防止梯度爆炸),而a这一项的设计在与:当两个框的IOU很小时,即两框不相交时,没必要考虑两个框之间的长框比例,只有IOU较大,也即两框较接近时,才去考虑长框的事。
SIoU的设计总体来说,相较于之前的设计,除了考虑了重叠区域,距离和长宽,还多考虑了两个框之间的角度问题,下面依次看看其是如何设计。
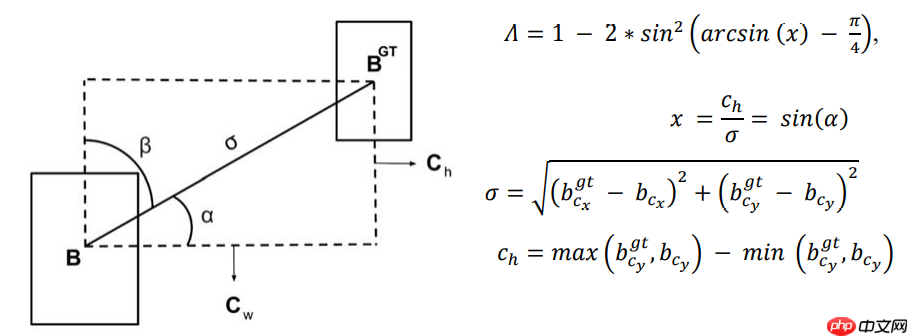
两框角度考虑: 作者在SIoU中引入角度的损失,主要是为了辅助两框之间的距离来计算的,因为在目标检测的一开始的训练中,大多少的预测框是跟真实框不相交的,所以如何快速的收敛两框之间的距离是值得考虑的。
而其具体的作用,跟下面的两框的距离结合起来一起来看。(这里的公式a,在大于45°时,换成β,即从x轴上的角度考虑转换成考虑y轴)
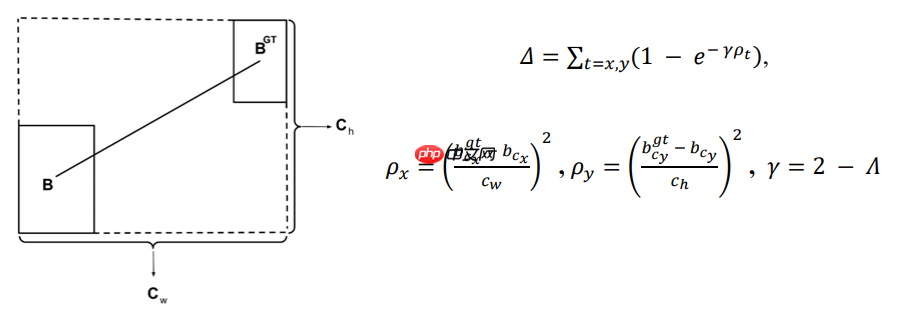
两框距离考虑: 其实这里的距离考虑,整体来说和上面介绍CIOU的思想是差不多的,通过两框中心的距离和外接矩形的长框来构建,但其多了一项γ,这一项则是和上面两框之间角度的考虑是挂钩的。
具体的说:以X轴为例,即两框近乎平行时,a趋近与0,这样计算出来两框之间的角度距离接近于0,此时γ也接近于2,那么两框之间的距离对于整体loss的贡献变少了。而当a趋近与45°时,计算出来两框之间的角度为1,此时γ接近1,则两框之间的距离应该被重视,需要占更大的loss。
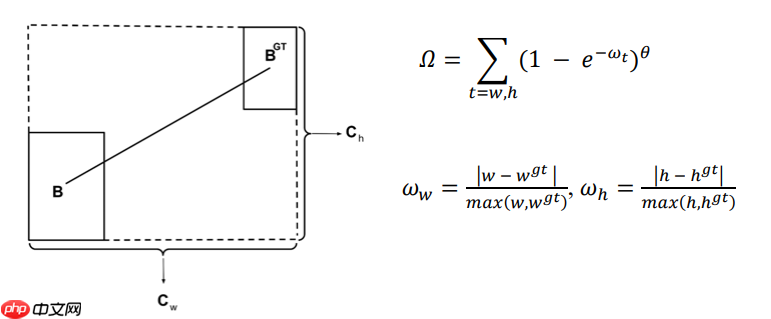
两框长宽考虑: 这里作者考虑的两框之间的长宽比,是通过计算两框之间宽之差和二者之间最大宽之比(长同理)来定义的,个人感觉和CIOU的相比,虽然形式上不一样,但大体思路是一样的,只不过CIOU可以的考虑是两框整体形状的收敛,而SIoU是以长、宽两个边收敛来达到整体形状收敛的效果。
这里另外一说,θ是个可调变量,来表示网络需要对形状这个,给予多少注意力,即占多少权重。实验中设置为4。
 Openflow
Openflow
一键极速绘图,赋能行业工作流
 88
查看详情
88
查看详情

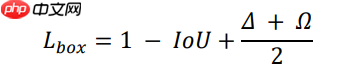
重叠区域考虑: 重叠区域的考虑其实就是普通的IoU啦,最后整体Loss以下式表达。
说了这么多,下面就以Paddl eDetection套件为开发环境,来复现一下SIoU,并和传统的GIOU以及CIOU进行比较。
eDetection套件为开发环境,来复现一下SIoU,并和传统的GIOU以及CIOU进行比较。
以套件中提供的交通标志数据集为参考数据集,以YOLOE网络为基础,复现SIoU。
这里下载下来的数据集是VOC格式的,只需要用套件自带的脚本,非常方便就可以转换为COCO格式,用于训练。
In [ ]!git clone https://gitee.com/paddlepaddle/PaddleDetection.gitIn [ ]
# 按照Paddledetection%cd PaddleDetection/ !pip install -r /home/aistudio/PaddleDetection/requirements.txt !python setup.py install %cd ..In [ ]
# 下载数据集%cd PaddleDetection/ !python dataset/roadsign_voc/download_roadsign_voc.pyIn [ ]
# 利用paddledetection自带的脚本,来将数据集转成coco形式%cd /home/aistudio/PaddleDetection/#转换train!python tools/x2coco.py \
--dataset_type voc \
--voc_anno_dir /home/aistudio/PaddleDetection/dataset/roadsign_voc/ \
--voc_anno_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/train.txt \
--voc_label_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/label_list.txt \
--voc_out_name /home/aistudio/PaddleDetection/dataset/roadsign_voc/voc_train.json#转换val!python tools/x2coco.py \
--dataset_type voc \
--voc_anno_dir /home/aistudio/PaddleDetection/dataset/roadsign_voc/ \
--voc_anno_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/valid.txt \
--voc_label_list /home/aistudio/PaddleDetection/dataset/roadsign_voc/label_list.txt \
--voc_out_name /home/aistudio/PaddleDetection/dataset/roadsign_voc/voc_val.json# 移入coco数据集!mv dataset/roadsign_voc/* dataset/coco
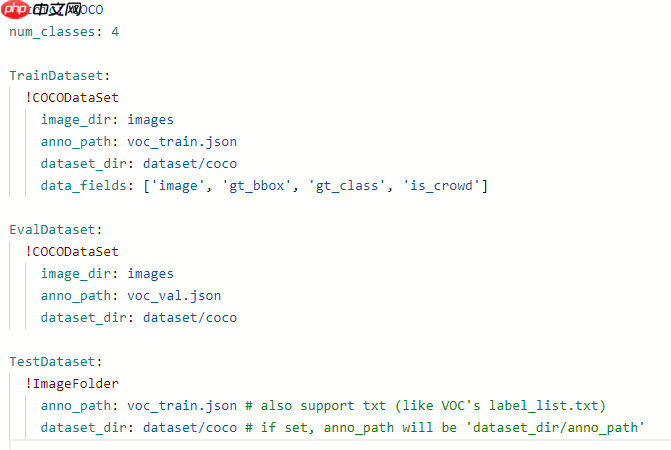
训练前,我们需要配置一下config文件,具体我们将config/datasets/coco_detection.yml修改为如下。
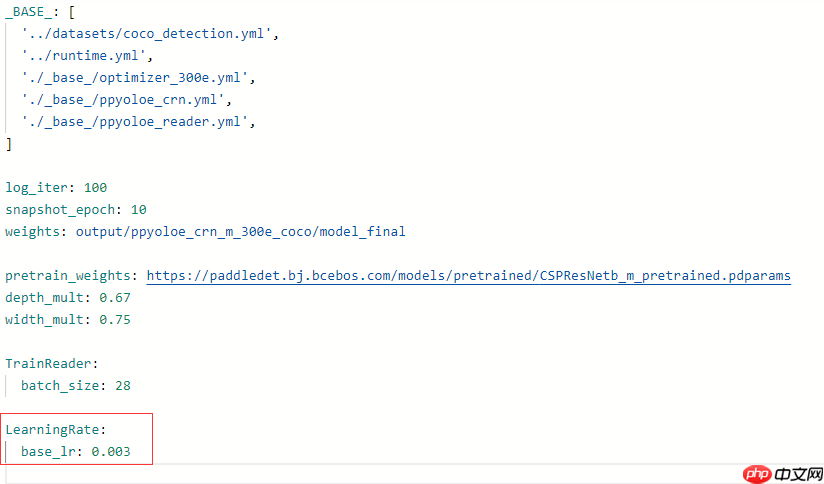
修改configs/ppyoloe/ppyoloe_crn_m_300e_coco.yml文件中的学习率为0.003.
如果我们不修改Loss,默认使用的是GIOU loss
要修改YOLOE的loss,要去ppdet/modeling/heads/ppyoloe_head.py文件下进行修改。
我们将第21行改为
from ..losses import GIoULoss, DIouLoss
并将ppdet/modeling/losses/iou_loss.py中的class DIouLoss类,修改如下。
class DIouLoss(GIoULoss): """
Distance-IoU Loss, see https://arxiv.org/abs/1911.08287
Args:
loss_weight (float): giou loss weight, default as 1
eps (float): epsilon to *oid divide by zero, default as 1e-10
use_complete_iou_loss (bool): whether to use complete iou loss
"""
def __init__(self, loss_weight=1., eps=1e-10, siou=False,use_complete_iou_loss=True):
super(DIouLoss, self).__init__(loss_weight=loss_weight, eps=eps)
self.use_complete_iou_loss = use_complete_iou_loss
self.siou = siou
def __call__(self, pbox, gbox, iou_weight=1.):
x1, y1, x2, y2 = paddle.split(pbox, num_or_sections=4, axis=-1)
x1g, y1g, x2g, y2g = paddle.split(gbox, num_or_sections=4, axis=-1)
cx = (x1 + x2) / 2
cy = (y1 + y2) / 2
w = x2 - x1 h = y2 - y1 cxg = (x1g + x2g) / 2
cyg = (y1g + y2g) / 2
wg = x2g - x1g hg = y2g - y1g x2 = paddle.maximum(x1, x2) y2 = paddle.maximum(y1, y2) # A and B
xkis1 = paddle.maximum(x1, x1g) ykis1 = paddle.maximum(y1, y1g) xkis2 = paddle.minimum(x2, x2g) ykis2 = paddle.minimum(y2, y2g) # A or B
xc1 = paddle.minimum(x1, x1g) yc1 = paddle.minimum(y1, y1g) xc2 = paddle.maximum(x2, x2g) yc2 = paddle.maximum(y2, y2g) intsctk = (xkis2 - xkis1) * (ykis2 - ykis1) intsctk = intsctk * paddle.greater_than(
xkis2, xkis1) * paddle.greater_than(ykis2, ykis1) unionk = (x2 - x1) * (y2 - y1) + (x2g - x1g) * (y2g - y1g
) - intsctk + self.eps iouk = intsctk / unionk if self.siou: cw = xc2 - xc1 ch = yc2 - yc1 s_cw = (x1g + x1 - x2g - x2) * 0.5
s_ch = (y1g + y1 - y2g - y2) * 0.5
sigma = paddle.pow(s_cw ** 2 + s_ch ** 2, 0.5) + self.eps sin_alpha_1 = paddle.abs(s_cw) / sigma sin_alpha_2 = paddle.abs(s_ch) / sigma threshold = pow(2, 0.5) / 2
sin_alpha = paddle.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1) angle_cost = paddle.sin(paddle.asin(sin_alpha) * 2) rho_x = (s_cw / (cw + self.eps)) ** 2
rho_y = (s_ch / (ch + self.eps)) ** 2
gamma = angle_cost - 2
distance_cost = 2 - paddle.exp(gamma * rho_x) - paddle.exp(gamma * rho_y) omiga_w = paddle.abs(w - wg) / paddle.maximum(w, wg) omiga_h = paddle.abs(h - hg) / paddle.maximum(h, hg) shape_cost = paddle.pow(1 - paddle.exp(-1 * omiga_w), 4) + paddle.pow(1 - paddle.exp(-1 * omiga_h), 4)
return paddle.mean((1- (iouk - 0.5 * (distance_cost + shape_cost))))*self.loss_weight # DIOU term
dist_intersection = (cx - cxg) * (cx - cxg) + (cy - cyg) * (cy - cyg) dist_union = (xc2 - xc1) * (xc2 - xc1) + (yc2 - yc1) * (yc2 - yc1) diou_term = (dist_intersection + self.eps) / (dist_union + self.eps) # CIOU term
ciou_term = 0
if self.use_complete_iou_loss: ar_gt = wg / hg ar_pred = w / h arctan = paddle.atan(ar_gt) - paddle.atan(ar_pred) ar_loss = 4. / np.pi / np.pi * arctan * arctan alpha = ar_loss / (1 - iouk + ar_loss + self.eps)
alpha.stop_gradient = True ciou_term = alpha * ar_loss diou = paddle.mean((1 - iouk + ciou_term + diou_term) * iou_weight)
return diou * self.loss_weight
这样我们在ppyoloe_head文件的81行,使用下面的代码,即开启了SIoU的使用。
self.iou_loss = DIouLoss(siou=True, use_complete_iou_loss=False)In [ ]
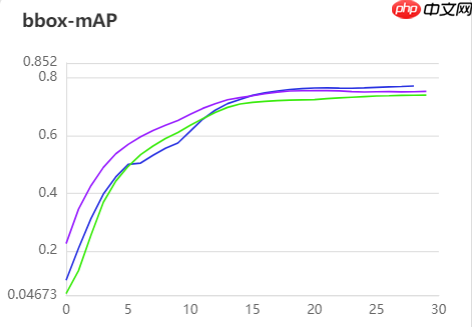
%cd PaddleDetection/ !python tools/train.py -c ../myconfig/ppyoloe_crn_m_300e_coco.yml --use_vdl=true --vdl_log_dir=vdl_dir/Test --eval \
紫色为SIOU曲线
深蓝色为CIOU曲线
绿色为GIOU曲线
以上就是【AI达人特训营】SIOU论文复现:Powerful的回归框学习能力的详细内容,更多请关注其它相关文章!
# 匈牙利
# 武安整合营销推广招聘
# 营销拓客推广方案范文怎么写
# 全网推广营销熊掌号
# 黑帽seo推广技术公司
# 常熟企业的网站建设
# 重庆做网站建设地方
# 合川抖音seo公司
# 网站建设运营面试流程
# 黄骅营销网站建设
# 徐州网站建设知识
# 之比
# 这一
# 套件
# 为例
# python
# 框中
# 一言
# 长宽
# 达人
# 中文网
# coco
# type
# fig
# udio
# igs
# red
# cos
# ai
# git
相关栏目:
【
Google疑问12 】
【
Facebook疑问10 】
【
优化推广96088 】
【
技术知识133117 】
【
IDC资讯59369 】
【
网络运营7196 】
【
IT资讯61894 】
相关推荐:
联想首发AI PC于今年秋季,英特尔CEO确认AI PC时代来临
微幼科技推出全自动晨检机器人,助力幼儿园校园健康检测
电池比 Air 2S 大 20%,大疆 Air 3 无人机现身 FCC
“世界上最像人的机器人”接入 Stable Diffusion ,现场完成作画
当TS遇上AI,会发生什么?
70年前他本想逃避考试,却影响了整个互联网
1000万张照片训练AI模型 科学家找到水下定位新方法
乐天派桌面机器人加入小米米家生态系统,实现与其他智能设备的互联
微软最新推出的NaturalSpeech2语音合成模型:提供更准确的语音重构,避免棒读效果
《共同的演化》展览启幕,重新思考人类与人工智能关系
优地网络助力新媒体拥抱人工智能时代
CharacterAI - 也许会成为会话人工智能的未来
AI技术改变*,新骗局来袭,*成功率接近100%
DeepMind用AI重写排序算法;将33B大模型塞进单个消费级GPU
配 3D 机器人头像,谷歌展示全新安卓 LOGO
AI技术加速迭代:周鸿祎视角下的大模型战略
AI数字人业务频频获点赞,谦寻积极引领示范作用
微软 Azure AI 文本转语音服务升级:新增男性声音和扩展语言支持
全球首款AI裸眼3D平板 国产的售价破万
Xreal AR 眼镜用投屏盒子 Beam 发布:分体式设计,到手 699 元
边喷火边跳踢踏舞,机器狗最新技能爆火全网!网友直呼真·热狗
争鸣:OpenAI奥特曼、Hinton、杨立昆的AI观点到底有何不同?
人工智能助力林草行业高质量发展
智能手机应用中的人工智能的重要性
日媒关注中国推进鸟类识别 AI 普及,除监测保护外还可预防传染性疾病
大模型训练成本降低近一半!新加坡国立大学最新优化器已投入使用
AI新视野,增长新势能,伙伴云受邀出席笔记侠创业讲真话AI峰会
构建AI绘画网站的方法:使用API接口和调用步骤
十个AI算法常用库J*a版
世界上第一个完全由人工智能驱动的图像编辑器!
昇腾AI大模型训推一体化解决方案将在WAIC发布
中国最强AI研究院的大模型为何迟到了
WHEE上线时间介绍
央视报道车载人机交互技术!MWC上海魅族表现亮眼,现场热火朝天
网友自制 AI 版《流浪地球 3》预告片,登上 CCTV6
华为联合合作伙伴 共同发布昇腾AI大模型训推一体化解决方案
讯飞星火大模型实现升级 助力通用人工智能人才培养
Snap宣布研发出新技术 可大幅提升AI生成图像速度
读创正式上线“读创AI聊”功能
Gartner预测:到2025年,全球对话式人工智能支出预计将达到1860亿美元
两型无人机完成交付!国家级机动观测业务正式启动
贫穷让我预训练
令人惊叹!AI模型能够以iPhone照片为基础创作诗歌
“思享荟”沙龙热议AIGC与元宇宙 复旦大学赵星畅谈深度数字化
AIGC浪潮下,联想集团再加码计算与人工智能
谷歌推出 AI 反洗钱工具,可将金融机构内部风险预警准确率提高2至4倍
AI遇上大运丨热身拉伸、娱乐K歌……AI智能健身镜将亮相成都大运会
映宇宙集团执行总编辑:元宇宙还是要以人为媒介
2025 WAIC|美团无人机发布第四代新机型
人工智能“Aria”现身 Opera浏览器100版本更新:新功能“标签岛”
2025-07-31

运城市盐湖区信雨科技有限公司是一家深耕海外推广领域十年的专业服务商,作为谷歌推广与Facebook广告全球合作伙伴,聚焦外贸企业出海痛点,以数字化营销为核心,提供一站式海外营销解决方案。公司凭借十年行业沉淀与平台官方资源加持,打破传统外贸获客壁垒,助力企业高效开拓全球市场,成为中小企业出海的可靠合作伙伴。
