本文基于DeepGlobe地表覆盖数据集,利用PaddleSeg的PP-LiteSeg、DeepLabV3P、ANN三种分割模型,在相同超参数下开展训练对比。数据集经格式转换、7:3划分训练与验证集后,通过准确率、mIoU等指标评估,结果显示DeepLabV3P模型效果最优,可辅助识别农业用地非法侵占。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
农业是国之根本,但侵占基本农田的案例时有发生,我国土地面积辽阔,对农业用地非法侵占行为的识别需要耗费大量的时间和人力物力。利用深度学习的语义分割,能够帮助政府管理人员识别和统计农业用地地块,大大减少人工工作量。
本文使用PaddleSeg套件中的三种分割模型(PP-LiteSeg, DeepLabV3P, ANN),针对DeepGlobe地表覆盖数据集。配置相同的超参数,对比三种模型训练结果。主要分为引言、环境安装、数据准备、模型训练、模型评估、结果对比以及附录等主要部分。
本文使用的是DeepGlobe地表覆盖数据集,其包含具体内容如下所示。本文将train文件夹下的图像按7:3比例划分为训练集和验证集。其次,将标注图像的三通道转换为单通道(通道值从0开始),用0-6进行像素替换。
├── class_dict.csv├── metadata.csv├── test │ ├── 100877_sat.jpg│ ├── 103215_sat.jpg│ ├── ... ├── train │ ├── 1008694_mask.png│ ├── 1000694_sat.jpg│ ├── ... ├── valid │ ├── 105036_sat.jpg│ ├── 107780_sat.jpg│ ├── ...
数据集中某张images原图如下所示:
数据集中某张images对应的mask图像如下所示:
PaddleSeg是基于飞桨PaddlePaddle开发的端到端图像分割开发套件,涵盖了高精度和轻量级等不同方向的大量高质量分割模型。通过模块化的设计,提供了配置化驱动和API调用两种应用方式,帮助开发者更便捷地完成从训练到部署的全流程图像分割应用。PaddleSeg具体介绍及使用说明请参考:飞桨高性能图像分割开发套件
In [3]! git clone https://gitee.com/paddlepaddle/PaddleSeg
正克隆到 'PaddleSeg'... remote: Enumerating objects: 18055, done. remote: Counting objects: 100% (3018/3018), done. remote: Compressing objects: 100% (1534/1534), done. remote: Total 18055 (delta 1698), reused 2505 (delta 1435), pack-reused 15037 接收对象中: 100% (18055/18055), 341.84 MiB | 12.92 MiB/s, 完成. 处理 delta 中: 100% (11562/11562), 完成. 检查连接... 完成。In [4]
# 移动文件夹! mv PaddleSeg /home/aistudio/work
%cd ~/work/PaddleSeg/ !pip install -r requirements.txt %env PYTHONPATH=.:$PYTHONPATH %env CUDA_VISIBLE_DEVICES=0
# 切换当前工作目录%cd ~
/home/aistudioIn [ ]
# 解压数据集! unzip /home/aistudio/data/data145161/DeepGlobeLandCoverClassificationDataset.zip
我们需要将自定义数据集转换成如下格式,进而使用PadleSeg套件进行训练。
DeepGlobe ||--images| |--0.jpg| |--1.jpg| |--2.jpg| |--...| |--labels| |--0.png| |--1.png| |--2.png| |--...| |--train.txt| |--val.txt| |--test.txt
images文件夹存放原图(通道数为3),labels文件夹存放标注图像(通道数为1),train.txt、val.txt、test.txt指定训练集、验证集和测试集。本项目按照7:3的比例对images划分训练集与验证集,并分别输出到train.txt与val.txt文件中。
labels文件夹下标注图要求: 标注图像必须为单通道图像,像素值即为对应的类别,像素标注类别需要从0开始递增。 例如0,1,2,3表示有4种类别,标注类别最多为256类。其中可以指定特定的像素值用于表示该值的像素不参与训练和评估(默认为255)。
本项目所用数据集包含7种类别,如下表所示,因此我们需要将labels文件夹下的标注图像转换为单通道,对应像素点由0-6表示。

train.txt和val.txt的内容如下所示:
images/0.jpg labels/0.pngimages/1.jpg labels/1.pngimages/2.jpg labels/2.pngimages/3.jpg labels/3.png
推荐用户将数据集放置在PaddleSeg下的data文件夹下。
In [7]%cd ~
/home/aistudio
通过以下代码可以查看某张图片的shape,dtype等详细信息,从而知道是否满足传入数据要求。
In [ ]%cd ~import numpy as npimport matplotlib.pyplot as pltimport cv2#jupyter 魔法指令,预加载,显示图片%matplotlib inline#读取图片img = cv2.imread('train/100694_mask.png',-1)#这里输入需要导入图片的位置print(img)#显示图片的数据print(img.shape)#查看图片的长宽及颜色print(img.dtype)
按照PaddleSeg要求格式对labels图像进行转化 三通道转单通道 RGB标注彩图转换为物体的黑白mask图像代码如下所示
此处标注图像通道转换脚本参考了网上项目中的思路,也可以考虑使用其他转换思路,如使用numpy像素替换。
In [10]# 读取标签import pandas as pdfrom PIL import Imageimport numpy as npimport cv2
classpd = pd.read_csv('class_dict.csv')
classpd
d = dict() # 存储各标签数量def countlabel(img_path):
label= Image.open(img_path)
label = np.asarray(label)
img= np.zeros((label.shape[0],label.shape[1]),np.uint8)
label.shape for i in range(len(classpd)):
row = classpd.loc[i,:]
r1,g1,b1 = row.r,row.g,row.b
red,green,blue = label[:,:,0], label[:,:,1], label[:,:,2]
mask = (red==r1) & (green==g1) & (blue==b1) if(row['name'] not in d.keys()):
d[row['name']]=0
d[row['name']]+=np.sum(mask)
In [11]
data_all = pd.read_csv('metadata.csv')
data_all.head()
image_id split sat_image_path mask_path 0 100694 train train/100694_sat.jpg train/100694_mask.png 1 102122 train train/102122_sat.jpg train/102122_mask.png 2 10233 train train/10233_sat.jpg train/10233_mask.png 3 103665 train train/103665_sat.jpg train/103665_mask.png 4 103730 train train/103730_sat.jpg train/103730_mask.pngIn [12]
mask_ = pd.notna(data_all.mask_path) data_notna = data_all[mask_] ddata_mask_path = data_notna.mask_pathIn [14]
from tqdm import trangefor i in trange(len(ddata_mask_path),desc='Progress ',le*e=False):
countlabel(ddata_mask_path[i])
<br/>In [15]
def imageconvlabel(img_path):
label= Image.open(img_path)
label = np.asarray(label)
img= np.zeros((label.shape[0],label.shape[1]),np.uint8) for i in range(len(classpd)):
row = classpd.loc[i,:]
r1,g1,b1 = row.r,row.g,row.b
red,green,blue = label[:,:,0], label[:,:,1], label[:,:,2]
mask = (red==r1) & (green==g1) & (blue==b1)
img[mask]=i
cv2.imwrite(img_path+'new.png',img)
In [17]
# 转化成label标注图for i in trange(len(ddata_mask_path),desc='Progress ',le*e=False):
imageconvlabel(ddata_mask_path[i])
<br/>
将train文件夹下的所有转换好的以new.png为后缀的label标注图片与image原图片分别输出到名为labels与images两个文件夹内。
In [18]# 将图片文件移动到images文件夹中import osimport shutildef take_samefile(or_path, tar_path, tar_type):
tar_path = tar_path if not os.path.exists(tar_path):
os.makedirs(tar_path)
path = or_path
files = os.listdir(path) # 读取or_path文件列表
for file in files:
file_type = str(file).split('.')[1] # 读取文件后缀
if file_type == tar_type: print("take{}from{}".format(file, files)) dir = path + '/' + file # 存储文件路径
deter = tar_path + '/' + str(file)
shutil.copyfile(dir, deter)
take_samefile(r"train", r"images", "jpg")
IOPub data rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to *oid crashing it. To change this limit, set the config variable `--ServerApp.iopub_data_rate_limit`. Current values: ServerApp.iopub_data_rate_limit=1000000.0 (bytes/sec) ServerApp.rate_limit_window=3.0 (secs)In [19]
# 将标签文件移动到labels文件夹中import osimport shutildef take_samefile(or_path, tar_path, tar_type):
tar_path = tar_path if not os.path.exists(tar_path):
os.makedirs(tar_path)
path = or_path
files = os.listdir(path) # 读取or_path文件列表
for file in files:
file_type = str(file).split('.')[-2] # 读取文件后缀
if file_type == tar_type: print("take{}from{}".format(file, files)) dir = path + '/' + file # 存储文件路径
deter = tar_path + '/' + str(file)
shutil.copyfile(dir, deter)
take_samefile(r"train", r"labels", "pngnew")
IOPub data rate exceeded. The Jupyter server will temporarily stop sending output to the client in order to *oid crashing it. To change this limit, set the config variable `--ServerApp.iopub_data_rate_limit`. Current values: ServerApp.iopub_data_rate_limit=1000000.0 (bytes/sec) ServerApp.rate_limit_window=3.0 (secs)
PaddleSeg要求传入label数据的命名格式从0开始依次递增,例如:0.png,1.png,2.png…
因labels中图片与images中图片相对应,所以将两文件夹内的图片先排序在依次重命名,就可以使得两文件夹重命名后的同名图片也一一对应。例如123.jpg与123.png是相对应image和label。
In [ ]'''
labels图像批量重命名
'''# 将labels文件内容排序后重命名import os
start = 0 # 开始的序号image_dir = '/home/aistudio/labels/' # 源图片路径images_list = os.listdir(image_dir)
images_list.sort() # 文件名 按数字排序print(images_list)
nums = len(os.listdir(image_dir))print('found %d pictures' % nums)
output_dir = '/home/aistudio/labels/' # 图像重命名后的保存路径for i in images_list:
os.rename(image_dir+i,output_dir+str(start)+'.png') # 前面是旧的路径,后面是新路径
start = start + 1print('finished!')
In [ ]
'''
images图像批量重命名
'''# 将images文件内容排序后重命名import os
start = 0 # 开始的序号image_dir = '/home/aistudio/images/' # 源图片路径images_list = os.listdir(image_dir)
images_list.sort() # 文件名 按数字排序print(images_list)
nums = len(os.listdir(image_dir))print('found %d pictures' % nums)
output_dir = '/home/aistudio/images/' # 图像重命名后的保存路径for i in images_list:
os.rename(image_dir+i,output_dir+str(start)+'.jpg') # 前面是旧的路径,后面是新路径
start = start + 1print('finished!')
In [22]
# 可视化相对应的image与labelimport cv2import matplotlib.pyplot as pltimport numpy as np
image = cv2.imread('images/0.jpg')
plt.figure(figsize=(8,8))
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
image1 = cv2.imread('labels/0.png')
plt.figure(figsize=(8,8))
plt.imshow(cv2.cvtColor(image1, cv2.COLOR_BGR2RGB))
plt.show()
<Figure size 576x576 with 1 Axes>
<Figure size 576x576 with 1 Axes>In [23]
# 新建目录! mkdir /home/aistudio/data/DeepGlobeIn [24]
# 移动需要用的文件夹! mv /home/aistudio/images /home/aistudio/data/DeepGlobe ! mv /home/aistudio/labels /home/aistudio/data/DeepGlobeIn [25]
%cd ~
/home/aistudio
按照7:3划分训练集与测试集并按照格式要求输出到train.txt与val.txt文件中
In [26]# 生成yml所需的数据列表import os
data_path = '/home/aistudio/data/DeepGlobe/images' # 这里数据的img和lab的文件名一张,可以简单写imgs_name = os.listdir(data_path) # 获取文件夹下所有文件的名字with open(data_path.replace('images', 'train.txt'), 'w') as tf: with open(data_path.replace('images', 'val.txt'), 'w') as vf: for idx, img_name in enumerate(imgs_name): if img_name != ".ipynb_checkpoints":
img_path = os.path.join('images', img_name)
lab_path = img_path.replace('images', 'labels').replace('jpg', 'png') # 替换image为label的路径
# print(idx)
if idx % 10 == 1 or idx % 10 == 2 or idx % 10 == 3: # 按7:3组织训练集和验证集
vf.write(img_path + ' ' + lab_path + '\n') else:
tf.write(img_path + ' ' + lab_path + '\n')
print('ok')
okIn [27]
! mkdir -p /home/aistudio/work/PaddleSeg/data/DeepGlobe ! mv data/DeepGlobe/ work/PaddleSeg/data/
下面将分别进行配置三个分割模型(PP-LiteSeg, DeepLabV3P, ANN),并开始训练。
更详细的模型库请参考:PaddleSeg模型库总览
模型训练与评估的详细指令可参考:PaddleSeg全流程跑通
In [2]# 进入PaddleSeg的目录%cd /home/aistudio/work/PaddleSeg/
/home/aistudio/work/PaddleSeg
本模型选用的基本配置文件地址如下所示,并按照以下参数进行修改,完整修改后的配置文件请见附录代码。
/home/aistudio/work/PaddleSeg/configs/quick_start/pp_liteseg_optic_disc_512x512_1k.yml
 Openflow
Openflow
一键极速绘图,赋能行业工作流
 88
查看详情
88
查看详情

训练指令中设定每100轮训练保存一次模型,并开启边训练边评估指令。配置文件的参数设定如下所示,为统一模型参数从而比较三种模型的效果,以下两个模型配置文件也将使用与此相同的参数配置。
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化
# 进入PaddleSeg的目录%cd /home/aistudio/work/PaddleSeg/# 设置1张可用的卡! export CUDA_VISIBLE_DEVICES=0 # 训练 选择配置开始训练。可以通过 -o 选项覆盖配置文件中的参数! python train.py \
--config configs/quick_start/pp_liteseg_optic_disc_512x512_1k.yml \
--do_eval \
--use_vdl \
--s*e_interval 100 \
--s*e_dir out/PPLiteSeg_yml_output \# do_eval:是否在保存模型时启动评估, 启动时将会根据mIoU保存最佳模型至best_model# log_iters:打印日志的间隔步数,默认为10# s*e_interval:模型保存的间隔步数# s*e_dir:模型和visualdl日志文件的保存根路径
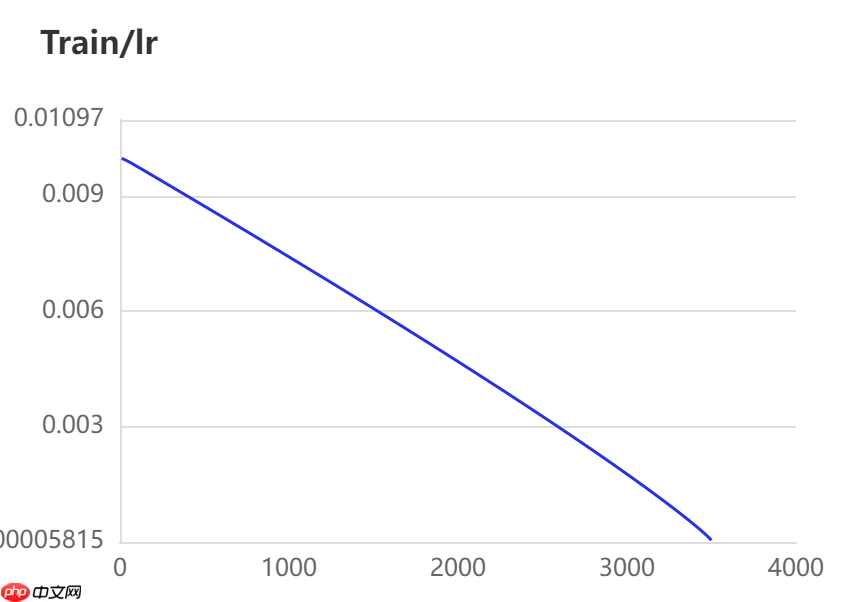
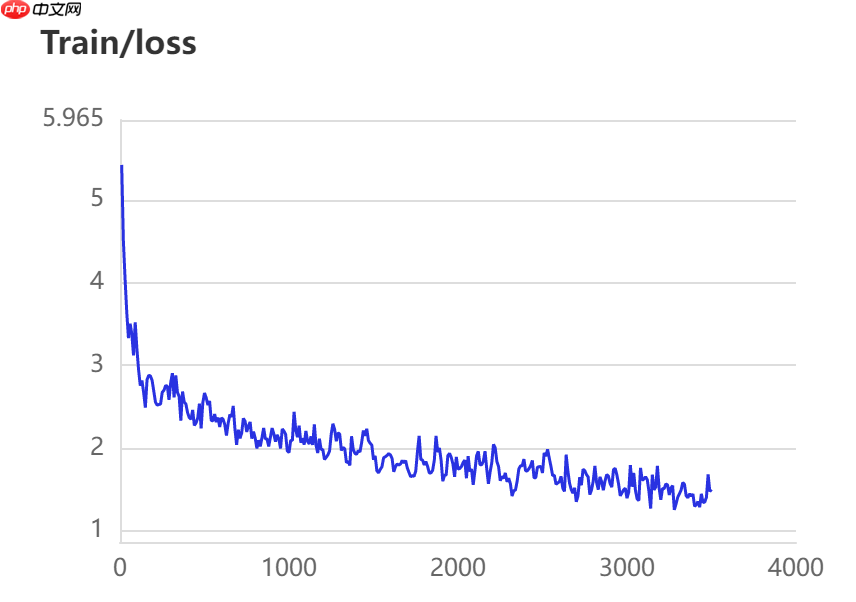
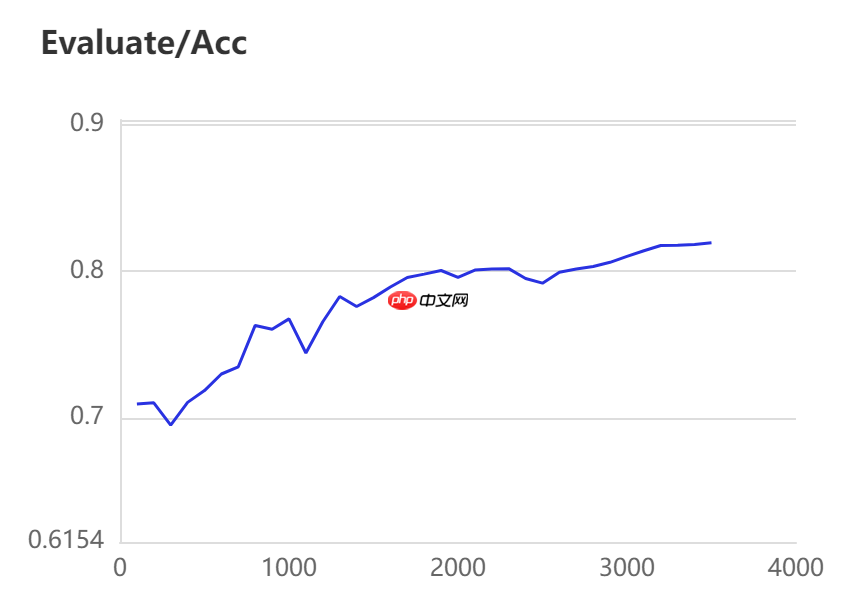
为了更直观我们的网络训练过程,对网络进行分析从而更快速的得到更好的网络,飞桨提供了可视化分析工具:VisualDL,训练中开启use_vdl指令,在模型保存文件夹下会自动保存.log文件,在侧边栏中的数据模型可视化选项中选中该logdir所在文件夹,打开即可看到可视化训练过程。更多可视化细节可参考:训练过程可视化
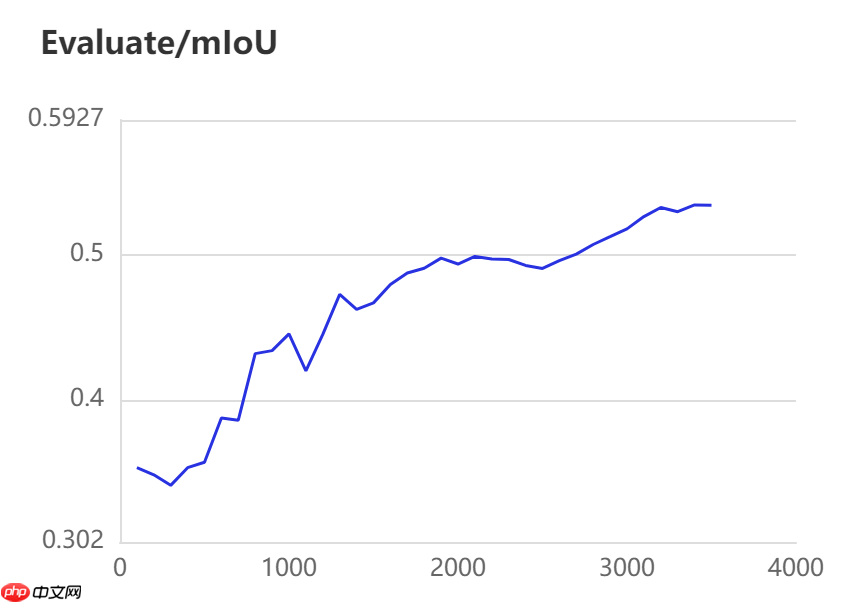
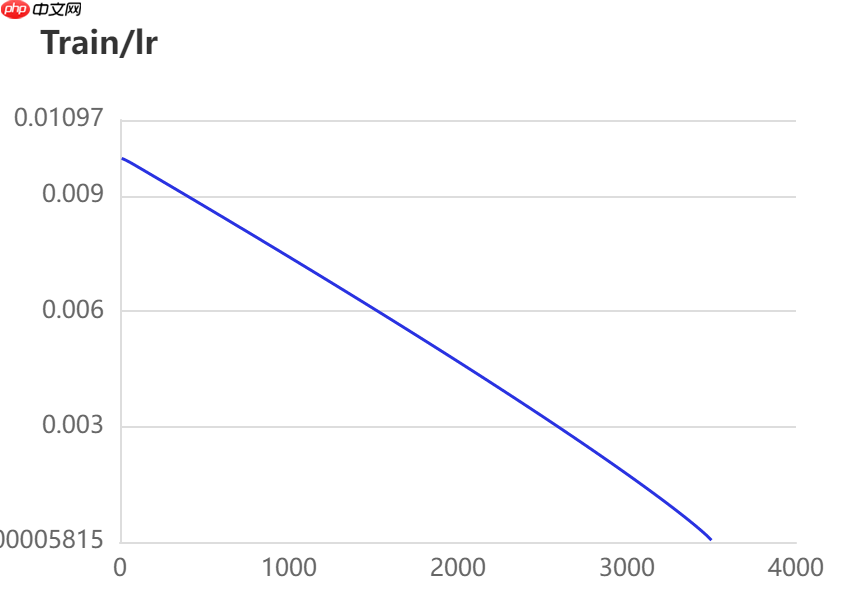
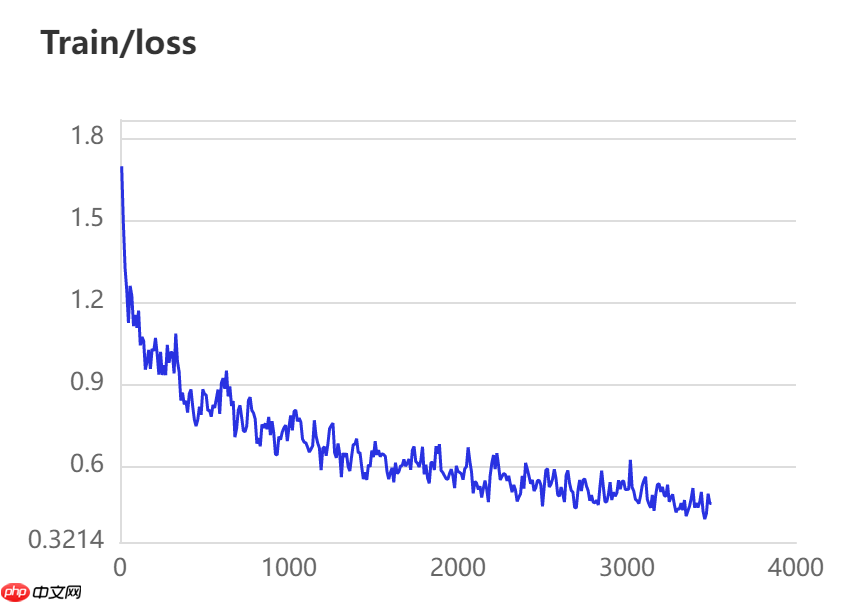
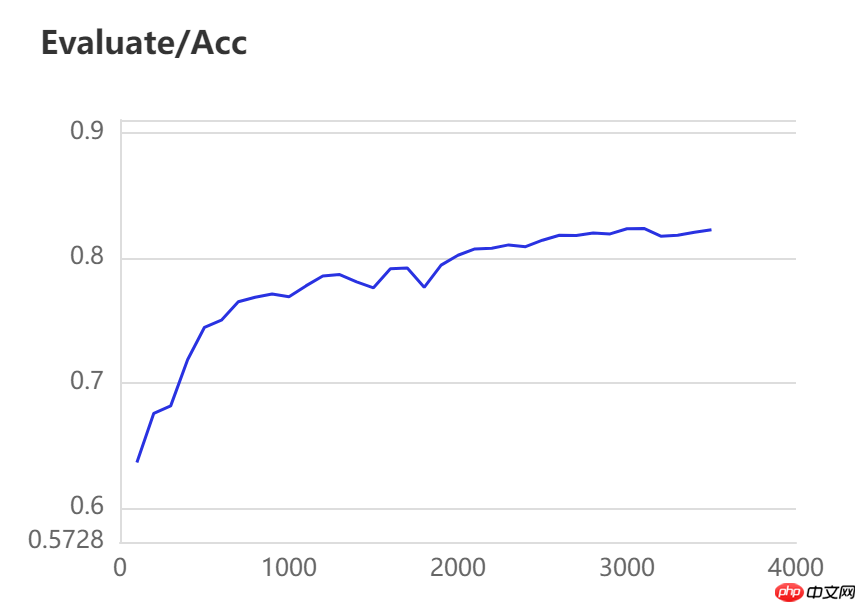
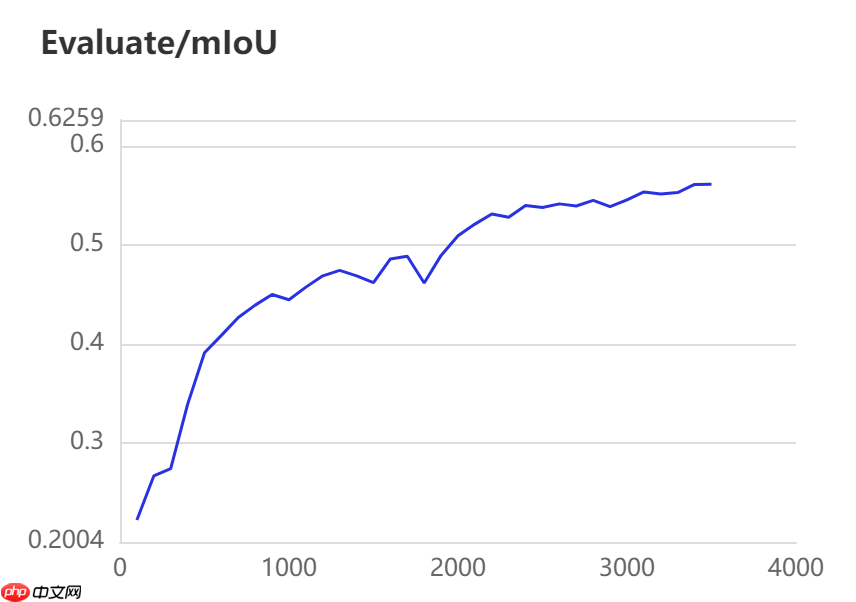
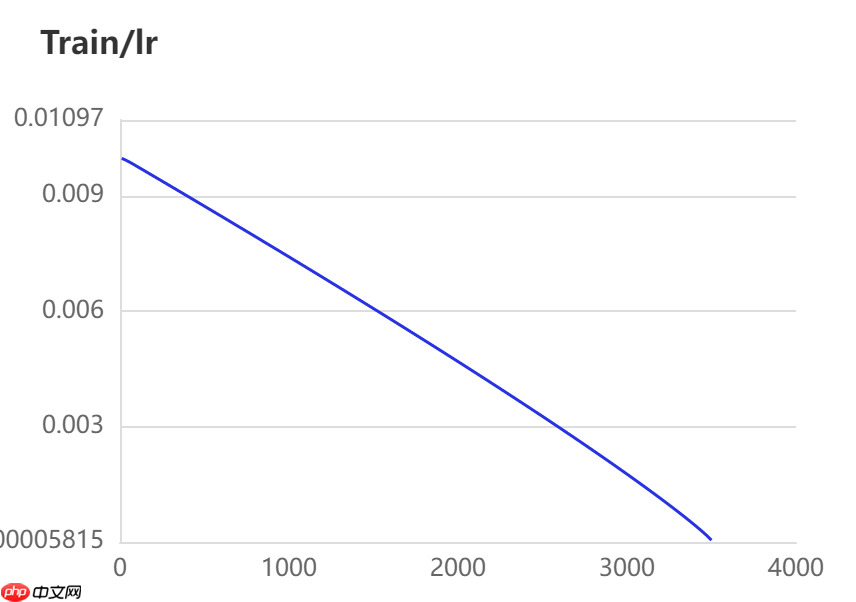
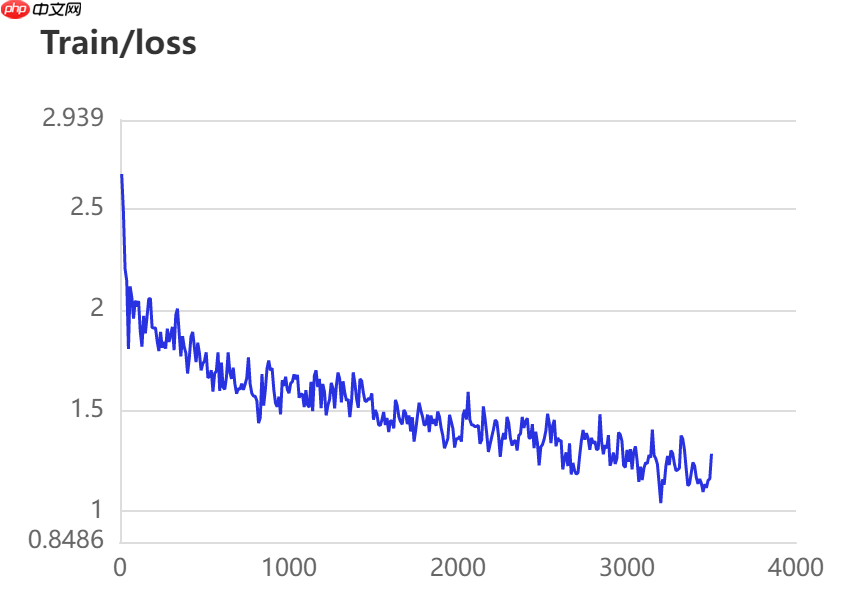
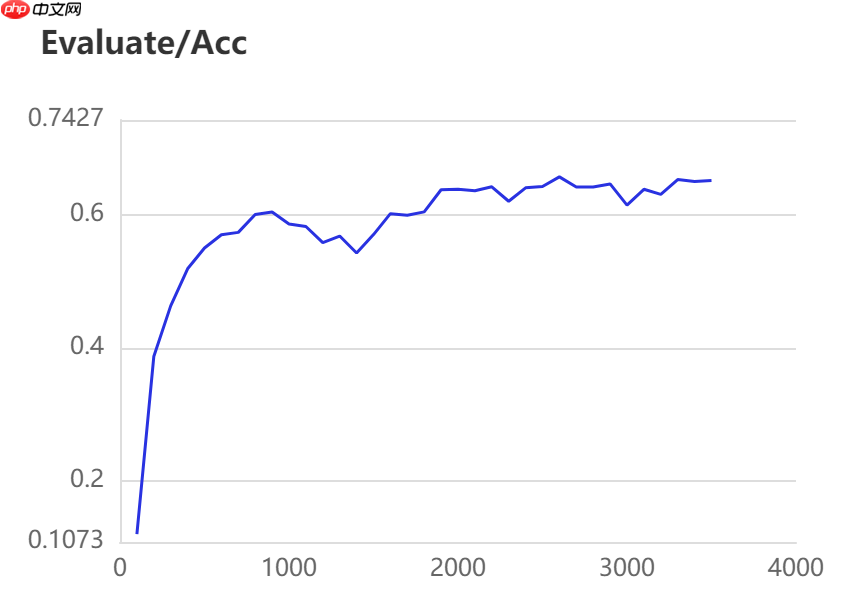
当打开use_vdl开关后,PaddleSeg会将训练过程中的数据写入VisualDL文件 3500轮训练过程中,学习率(learn rate)、训练损失(loss)、平均交并比(Mean Intersection over Union,简称mIoU)以及准确率(acc)的具体变化如下图所示。
本模型选用的基本配置文件地址如下所示,并按照以下参数进行修改,完整修改后的配置文件请见附录代码。
/home/aistudio/work/PaddleSeg/configs/quick_start/deeplabv3p_resnet50_os8_optic_disc_512x512_1k_teacher.yml
训练指令中设定每100轮训练保存一次模型,并开启边训练边评估指令。参数设定与上一个模型相同,详情如下所示:
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化
# 进入PaddleSeg的目录%cd /home/aistudio/work/PaddleSeg/# 设置1张可用的卡! export CUDA_VISIBLE_DEVICES=0 # 训练 选择配置开始训练。可以通过 -o 选项覆盖配置文件中的参数! python train.py \
--config configs/quick_start/deeplabv3p_resnet50_os8_optic_disc_512x512_1k_teacher.yml \
--do_eval \
--use_vdl \
--s*e_interval 100 \
--s*e_dir output/deeplabv3p_yml_output \
当打开use_vdl开关后,PaddleSeg会将训练过程中的数据写入VisualDL文件 3500轮训练过程中,学习率(learn rate)、训练损失(loss)、平均交并比(Mean Intersection over Union,简称mIoU)以及准确率(acc)的具体变化如下图所示。
训练指令中设定每100轮训练保存一次模型,并开启边训练边评估指令。本模型选用的基本配置文件地址如下所示,并按照以下参数进行修改,完整修改后的配置文件请见附录代码。
/home/aistudio/work/PaddleSeg/configs/ann/ann_resnet101_os8_voc12aug_512x512_40k.yml
参数设定与以上两个模型相同,详情如下所示:
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化
# 进入PaddleSeg的目录%cd /home/aistudio/work/PaddleSeg/# 设置1张可用的卡! export CUDA_VISIBLE_DEVICES=0 # 训练 选择配置开始训练。可以通过 -o 选项覆盖配置文件中的参数! python train.py \
--config configs/ann/ann_resnet101_os8_voc12aug_512x512_40k.yml \
--do_eval \
--use_vdl \
--s*e_interval 100 \
--s*e_dir output/ann_yml_output \
当打开use_vdl开关后,PaddleSeg会将训练过程中的数据写入VisualDL文件 3500轮训练过程中,学习率(learn rate)、训练损失(loss)、平均交并比(Mean Intersection over Union,简称mIoU)以及准确率(acc)的具体变化如下图所示。
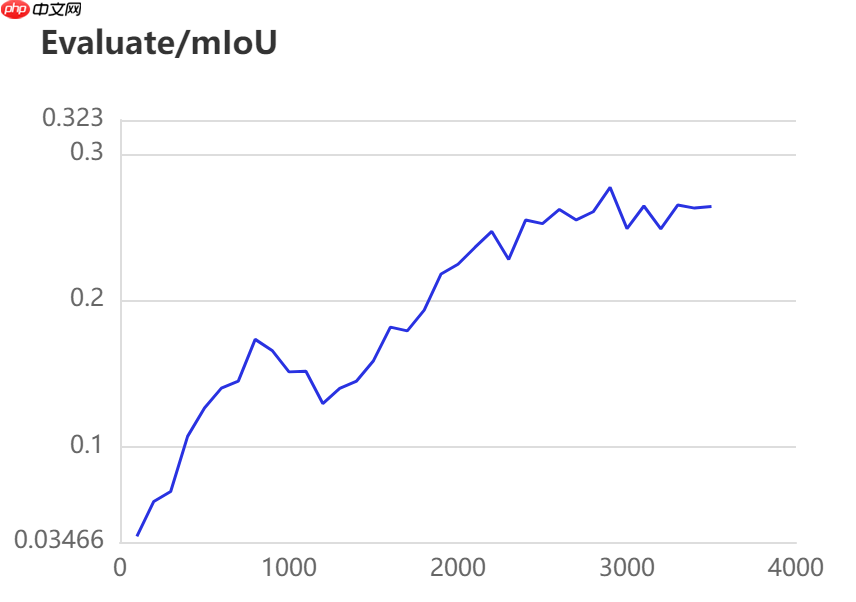
在图像分割领域中,评估模型质量主要是通过三个指标进行判断,准确率(acc)、平均交并比(Mean Intersection over Union,简称mIoU)、Kappa系数。
使用如下命令评估训练保存的iter=3500时的模型
PP-LiteSeg模型评估结果如下所示:
! python val.py \
--config configs/quick_start/pp_liteseg_optic_disc_512x512_1k.yml \
--model_path output/PPLiteSeg_yml_output/iter_3500/model.pdparams
使用如下命令评估训练保存的iter=3500时的模型
Deeplabv3p模型评估结果如下所示:
! python val.py \
--config configs/quick_start/deeplabv3p_resnet50_os8_optic_disc_512x512_1k_teacher.yml \
--model_path output/deeplabv3p_yml_output/iter_3500/model.pdparams
使用如下命令评估训练保存的iter=3500时的模型
ANN模型评估结果如下所示:
! python val.py \
--config configs/ann/ann_resnet101_os8_voc12aug_512x512_40k.yml \
--model_path output/ann_yml_output/iter_3500/model.pdparams
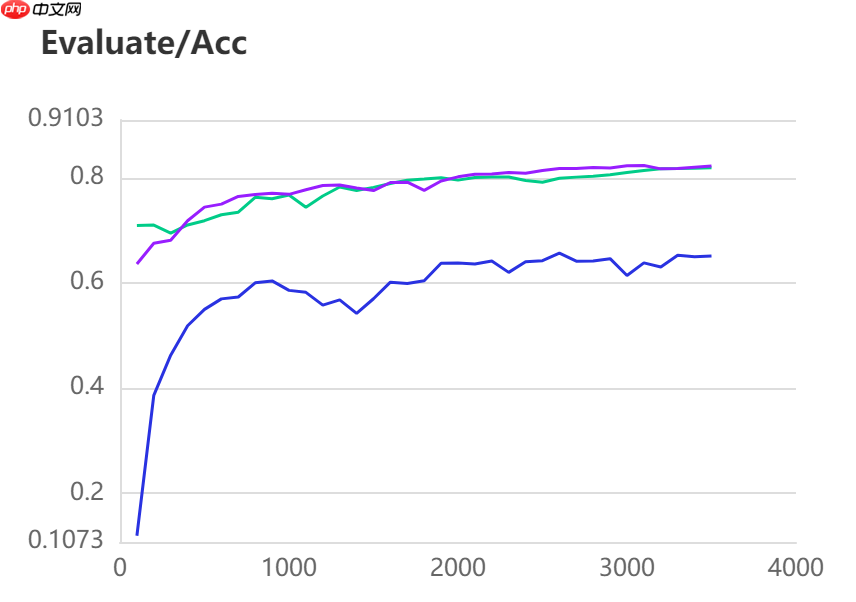
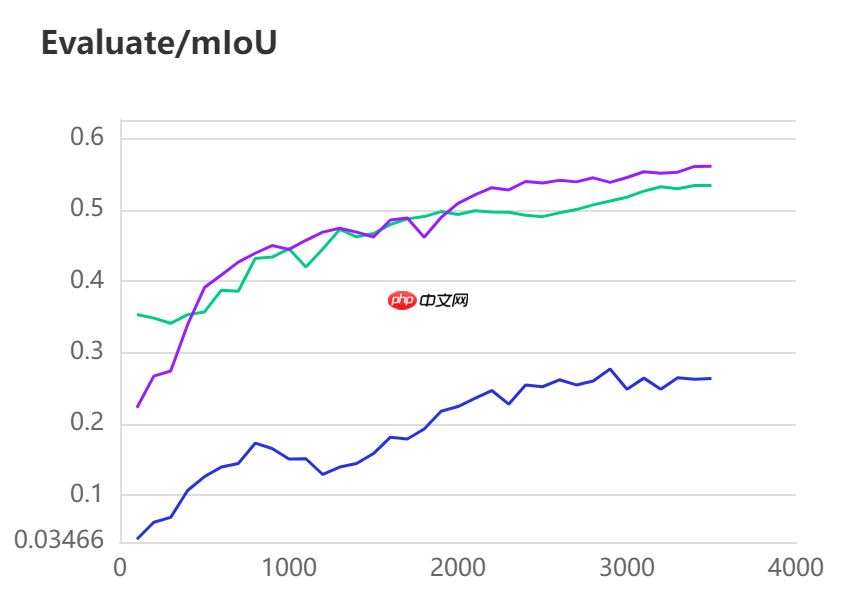
三种模型的效果(准确率与mIoU)详细对比如下所示:
图中记录了0-3500iter的完整训练过程,其中蓝色的线为ANN模型(Backbone: ResNet101_vd)训练效果,绿色的线为PP-LitSeg模型(Backbone: STDC2)训练效果,紫色的线为DeepLabv3p模型(Backbone: ResNet50_vd)的训练效果。
通过可视化训练结果可以看出,三种模型中,DeepLabv3p模型在DeepGlobe地表覆盖数据集中表现的效果更好。
本项目中三个模型用到的完整配置文件代码如下所示:
# work/PaddleSeg/configs/quick_start/pp_liteseg_optic_disc_512x512_1k.ymlbatch_size: 8 #设定batch_size的值即为迭代一次送入网络的图片数量,一般显卡显存越大,batch_size的值可以越大iters: 3500 #模型迭代的次数train_dataset: #训练数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
train_path: data/DeepGlobe/train.txt #数据集中用于训练的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: train #表示用于训练
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化val_dataset: #验证数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
val_path: data/DeepGlobe/val.txt #数据集中用于验证的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: val #表示用于验证
transforms: #数据预处理/增强的方式
- type: Normalize #图像进行归一化optimizer: #设定优化器的类型
type: sgd #采用SGD(Stochastic Gradient Descent)随机梯度下降方法为优化器
momentum: 0.9 #动量
weight_decay: 4.0e-5 #权值衰减,使用的目的是防止过拟合lr_scheduler: # 学习率的相关设置
type: PolynomialDecay # 一种学习率类型。共支持12种策略
learning_rate: 0.01
power: 0.9
end_lr: 0loss: #设定损失函数的类型
types:
- type: CrossEntropyLoss #损失函数类型
coef: [1, 1, 1] # PP-LiteSeg有一个主loss和两个辅助loss,coef表示权重: total_loss = coef_1 * loss_1 + .... + coef_n * loss_nmodel: #模型说明
type: PPLiteSeg #设定模型类别
backbone: # 设定模型的backbone,包括名字和预训练权重
type: STDC2
pretrained: https://bj.bcebos.com/paddleseg/dygraph/PP_STDCNet2.tar.gz
# work/PaddleSeg/configs/quick_start/deeplabv3p_resnet50_os8_optic_disc_512x512_1k_teacher.ymlbatch_size: 8iters: 3500train_dataset: #训练数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
train_path: data/DeepGlobe/train.txt #数据集中用于训练的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: train #表示用于训练
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化val_dataset: #验证数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
val_path: data/DeepGlobe/val.txt #数据集中用于验证的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: val #表示用于验证
transforms: #数据预处理/增强的方式
- type: Normalize #图像进行归一化optimizer:
type: sgd
momentum: 0.9
weight_decay: 4.0e-5lr_scheduler:
type: PolynomialDecay
learning_rate: 0.01
end_lr: 0
pow er: 0.9loss:
types:
- type: CrossEntropyLoss
coef: [1]model:
type: DeepLabV3P
backbone:
type: ResNet50_vd
output_stride: 8
multi_grid: [1, 2, 4] pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet50_vd_ssld_v2.tar.gz
num_classes: 7
backbone_indices: [0, 3] aspp_ratios: [1, 12, 24, 36] aspp_out_channels: 256
align_corners: False
pretrained: Null
er: 0.9loss:
types:
- type: CrossEntropyLoss
coef: [1]model:
type: DeepLabV3P
backbone:
type: ResNet50_vd
output_stride: 8
multi_grid: [1, 2, 4] pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet50_vd_ssld_v2.tar.gz
num_classes: 7
backbone_indices: [0, 3] aspp_ratios: [1, 12, 24, 36] aspp_out_channels: 256
align_corners: False
pretrained: Null
# work/PaddleSeg/configs/ann/ann_resnet101_os8_voc12aug_512x512_40k.yml_base_: 'ann_resnet50_os8_voc12aug_512x512_40k.yml'model: backbone: type: ResNet101_vd pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet101_vd_ssld.tar.gz
# work/PaddleSeg/configs/ann/ann_resnet50_os8_voc12aug_512x512_40k.yml_base_: '../_base_/pascal_voc12aug.yml'loss:
types:
- type: CrossEntropyLoss
coef: [1, 0.4]model:
type: ANN
backbone:
type: ResNet50_vd
output_stride: 8
pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet50_vd_ssld_v2.tar.gz
backbone_indices: [2, 3] key_value_channels: 256
inter_channels: 512
psp_size: [1, 3, 6, 8] enable_auxiliary_loss: True
align_corners: False
pretrained: null
# work/PaddleSeg/configs/_base_/pascal_voc12aug.yml _base_: './pascal_voc12.yml'train_dataset: mode: train
# work/PaddleSeg/configs/_base_/pascal_voc12.ymlbatch_size: 8iters: 3500train_dataset: #训练数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
train_path: data/DeepGlobe/train.txt #数据集中用于训练的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: train #表示用于训练
transforms: #数据预处理/增强的方式
- type: ResizeStepScaling #将原始图像和标注图像随机缩放为0.5~2.0倍
min_scale_factor: 0.5
max_scale_factor: 2.0
scale_step_size: 0.25
- type: RandomPaddingCrop #从原始图像和标注图像中随机裁剪512x512大小
crop_size: [512, 512] - type: RandomHorizontalFlip #采用水平反转的方式进行数据增强
- type: RandomDistort #亮度、对比度、饱和度随机变动
brightness_range: 0.5
contrast_range: 0.5
saturation_range: 0.5
- type: Normalize #将图像归一化val_dataset: #验证数据设置
type: Dataset #数据集名字
dataset_root: data/DeepGlobe #数据集路径
val_path: data/DeepGlobe/val.txt #数据集中用于验证的标识文件
num_classes: 7 #指定目标的类别个数(背景也算为一类)
mode: val #表示用于验证
transforms: #数据预处理/增强的方式
- type: Normalize #图像进行归一化optimizer:
type: sgd
momentum: 0.9
weight_decay: 4.0e-5lr_scheduler:
type: PolynomialDecay
learning_rate: 0.01
end_lr: 0
power: 0.9loss:
types:
- type: CrossEntropyLoss
coef: [1]
以上就是【校园AI Day-AI workshop】卫星遥感图像切割多模型对比的详细内容,更多请关注其它相关文章!
# git
# 工具
# python
# 三种
# seo标签title
# 也算
# 过程中
# 地表
# 钦州seo站内优化
# SEO管理团队拍照创意
# 内乡网站推广方案
# 陆埠网络营销推广
# 食品公司网站建设案例
# seo主演的电影
# 晋中租房网站建设管理
# 专业网站推广哪家强
# 新媒体营销推广好处
# 饱和度
# 重命名
# 配置文件
# 多模
# 中文网
# 所示
# 飞桨paddlepaddl
# lobe
# udio
# deepl
# igs
# red
# api调用
# ai
相关栏目:
【
Google疑问12 】
【
Facebook疑问10 】
【
优化推广96088 】
【
技术知识133117 】
【
IDC资讯59369 】
【
网络运营7196 】
【
IT资讯61894 】
相关推荐:
视觉中国推出付费AI绘图功能:无版权可用
马斯克发推讽刺人工智能,机器学习本质是统计?
电力人工智能数据集目录首次发布
人工智能即将进入Windows:企业准备好安全策略设置了吗?
网友自制 AI 版《流浪地球 3》预告片,登上 CCTV6
全国体育人工智能大会举办,专家聚焦体育人工智能领域人才培养
“痴迷”元宇宙,魔珐科技想做什么?
美图第二届影像节发布七款AI影像创作工具
AI拉动PCB发展|行业发现
黄仁勋:5年前,我们对AI抱有巨大期望
斑马推出全新升级版思维机:以人工智能为核心的交互式学习体验
随时随地,追踪每个像素,连遮挡都不怕的「追踪一切」视频算法来了
2025 年开发者必须知道的六个 AI 工具
沐曦首款AI推理GPU亮相:INT8算力达160TOPS!
OpenAI 向所有付费 API 用户开放 GPT-4
美图秀秀“AI 扩图”功能上线,可根据图像生成更大画幅
世界人工智能大会上,科大讯飞宣布与华为联手
Xreal AR 眼镜用投屏盒子 Beam 发布:分体式设计,到手 699 元
AI 作画工具 Midjourney 推出“pan”功能,可平移扩展图片外场景
650亿参数,8块GPU就能全参数微调:邱锡鹏团队把大模型门槛打下来了
AI大模型,将为智慧城市带来哪些新变化?
IBM与NASA联手开源地理空间AI基础模型,促进气候科学领域进步
昇腾AI & 讯飞星火:深度联手,共话国产大模型“大未来”
携程发布旅游行业垂直大模型 梁建章:AI策略是做可靠的内容 放心的推荐
读创正式上线“读创AI聊”功能
提升工作效率的智能工具:Zapier 让工作变得更简单!
利好来了,AI再起一波?
如何利用AI工具写好本科论文:科技助你一臂之力
无需标注数据,「3D理解」进入多模态预训练时代!ULIP系列全面开源,刷新SOTA
中国移动副总经理高同庆:打造人工智能时代的智能服务运营新范式
“五年内人类程序员将消失”预言引争议,AI真的那么强大了吗?
人工智能如何帮助制造业?
ChatGPT会成为你家新的语音助手吗?
AI证件照生成器:实际测试中AI软件展现了绝无仅有的强大效能
上海发布“元宇宙关键技术攻关行动方案”,加快 AIGC 等突破
全新小艺搭载AI大模型,有效提升学生和职场人士的工作效率
谷歌计划在上海举办开发者大会,重点关注机器学习和生成式AI领域
当TS遇上AI,会发生什么?
数字彩排、虚拟建厂!这家顶级洗衣机工厂敲开“工业元宇宙”之门
大厂出品!这个AI网站太顶了,所有功能免费用
昌吉市利用无人机实现全天候河道动态巡检
大语言模型的视觉天赋:GPT也能通过上下文学习解决视觉任务
笔神作文声讨学而思AI大模型 称用“爬虫”技术盗取数据
标小智LOGO推出AI公司起名生成器“Name.GPT”
特斯拉机器人面世 未来将大幅提振磁材需求,引领人工智能时代
谷歌内部正在测试代号为Genesis的AI新闻写作产品
英伟达推出 L40S GPU,AI 推理性能超过 A100 约 1.2 倍
Unity 推出面向开发者的 AI 软件市场 AI Hub,股价飙涨 15%
万兴播爆桌面端上线,支持AI数字人搜索、视频编辑等功能
AI无法对传统文化符号进行解构和创新
2025-07-30

运城市盐湖区信雨科技有限公司是一家深耕海外推广领域十年的专业服务商,作为谷歌推广与Facebook广告全球合作伙伴,聚焦外贸企业出海痛点,以数字化营销为核心,提供一站式海外营销解决方案。公司凭借十年行业沉淀与平台官方资源加持,打破传统外贸获客壁垒,助力企业高效开拓全球市场,成为中小企业出海的可靠合作伙伴。

 er: 0.9loss:
types:
- type: CrossEntropyLoss
coef: [1]model:
type: DeepLabV3P
backbone:
type: ResNet50_vd
output_stride: 8
multi_grid: [1, 2, 4] pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet50_vd_ssld_v2.tar.gz
num_classes: 7
backbone_indices: [0, 3] aspp_ratios: [1, 12, 24, 36] aspp_out_channels: 256
align_corners: False
pretrained: Null
er: 0.9loss:
types:
- type: CrossEntropyLoss
coef: [1]model:
type: DeepLabV3P
backbone:
type: ResNet50_vd
output_stride: 8
multi_grid: [1, 2, 4] pretrained: https://bj.bcebos.com/paddleseg/dygraph/resnet50_vd_ssld_v2.tar.gz
num_classes: 7
backbone_indices: [0, 3] aspp_ratios: [1, 12, 24, 36] aspp_out_channels: 256
align_corners: False
pretrained: Null