目前,随着自动驾驶技术的越发成熟以及自动驾驶感知任务需求的日益增多,工业界和学术界非常希望一个理想的感知算法模型,可以同时完成三维目标检测以及基于BEV空间的语义分割任务。对于一辆能够实现自动驾驶功能的车辆而言,其通常会配备环视相机传感器、激光雷达传感器以及毫米波雷达传感器来采集不同模态的数据信息。从而充分利用不同模态数据之间的互补优势,使得不同模态之间的数据补充优势,比如三维点云数据可以为3D目标检测任务提供信息,而彩色图像数据则可以为语义分割任务提供更加准确的信息。 针对于不同模态数据之间的互补优势,通过将不同模态数据的有效信息转化到同一个坐标系中,便于之后的联合处理以及决策。比如三维点云数据可以转化到基于BEV空间的点云数据,而环视摄像头的图像数据可以通过相机内外参的标定将其投影到3D空间中,从而实现不同模态数据的统一处理。通过利用不同模态数据的优势,可以得到比单一模态数据更为准确的感知结果。 现在,我们已经可以部署在车上的多模态感知算法模型输出更加鲁棒准确的空间感知结果,通过精确的空间感知结果,可以为自动驾驶功能的实现提供更加可靠和安全的保障。
虽然最近在学术界和工业界提出了许多基于Transformer网络框架的多传感、多模态数据融合的3D感知算法,但均采用了Transformer中的交叉注意力机制来实现多模态数据之间的融合,以实现比较理想的3D目标检测结果。但是这类多模态的特征融合方法并不完全适用于基于BEV空间的语义分割任务。此外,除了采用交叉注意力机制来完成不同模态之间信息融合的方法外,很多算法采用基于LSA中前向向量转换方式来构建融合后的特征,但也存在着如下的一些问题:(限制字数,接下来进行具体描述)。
针对上述提到的在多模态融合过程中存在的诸多可能会影响到最终模型感知能力的问题,同时考虑到生成模型最近展现出来的强大性能,我们对生成模型进行了探索,用于实现多传感器之间的多模态融合和去噪任务。基于此,我们提出了一种基于条件扩散的生成模型感知算法DifFUSER,用于实现多模态的感知任务。通过下图可以看出,我们提出的DifFUSER多模态数据融合算法可以实现更加有效的多模态融合过程。  DifFUSER多模态数据融合算法可以实现更加有效的多模态融合过程,方法主要包括两个阶段。首先,我们使用生成模型对输入数据进行降噪和增强,生成干净且丰富的多模态数据。然后,利用生成模型生成的数据进行多模态融合,达到更好的感知效果。 通过DifFUSER算法的实验结果显示,我们提出的多模态数据融合算法可以实现更加有效的多模态融合过程。该算法在实现多模态感知任务时,能够实现更加有效的多模态融合过程,提升模型的感知能力。此外,该算法的多模态数据融合算法可以实现更加有效的多模态融合过程。总而言之
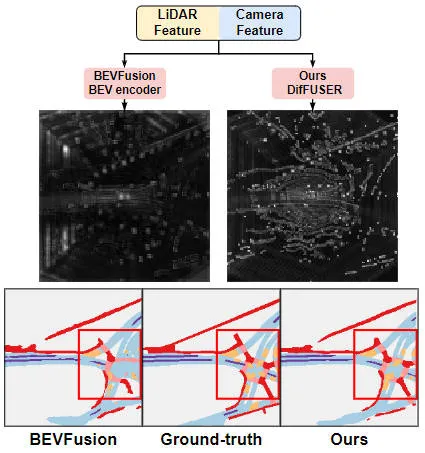
提出的算法模型与其它算法模型的结果可视化对比图
论文链接:https://arxiv.org/pdf/2404.04629.pdf
"DifFUSER算法的模块细节,基于条件扩散模型的多任务感知算法"是一种用于解决任务感知问题的算法。下图展示了我们提出的DifFUSER算法的整体网络结构。 在这个模块中,我们提出了一种基于条件扩散模型的多任务感知算法,用于解决任务感知问题。该算法的目标是通过在网络中传播和聚合任务特定的信息来提高多任务学习的性能。 DifFUSER算法的整
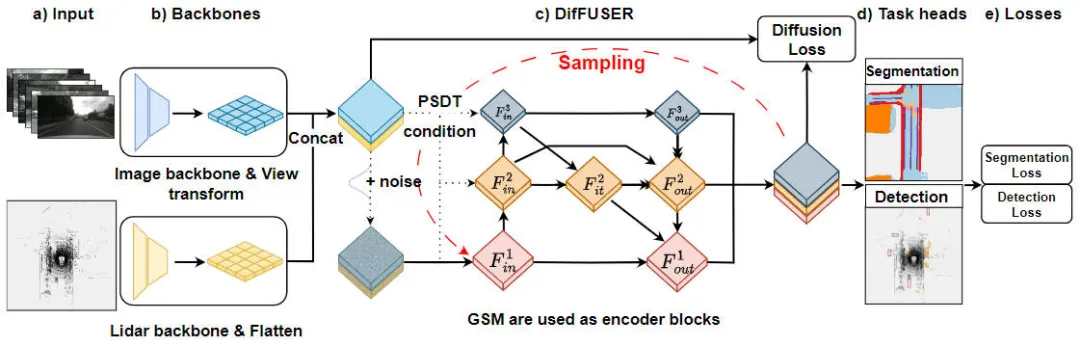 提出的DifFUSER感知算法模型网络结构图
提出的DifFUSER感知算法模型网络结构图
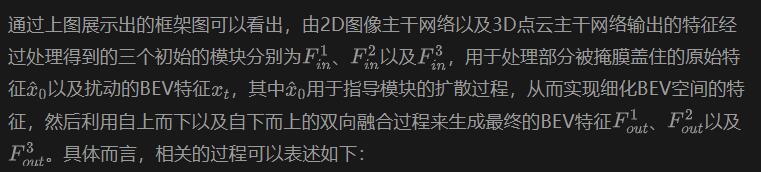
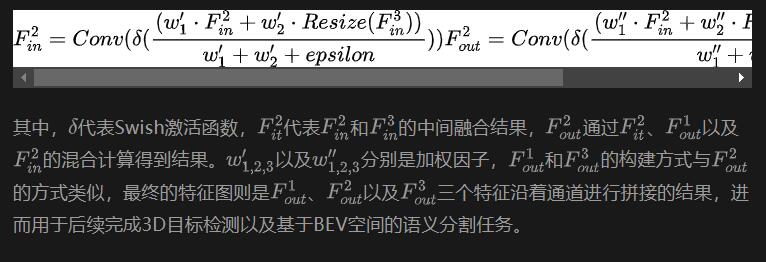
通过上图可以看出,我们提出的DifFUSER网络结构主要包括三个子网络,分别是主干网络部分、DifFUSER的多模态数据融合部分以及最终的BEV语义分割任务头部分。3D目标检测感知任务头部分。 在主干网络部分,我们使用了现有的深度学习网络架构,如ResNet或VGG等,通过提取输入数据的高级特征。 DifFUSER的多模态数据融合部分使用了多个并行的分支,每个分支用于处理不同的传感器数据类型(如图像、激光雷达和雷达等)。每个分支都有自
接下来,我们会仔细介绍模型中各个主要子部分的实现细节。
对于自动驾驶系统中的感知任务而言,算法模型能够对当前的外部环境进行实时的感知是至关重要的,所以确保扩散模块的性能和效率是非常重要的。因此,我们从双向特征金字塔网络中得到启发,引入一种条件类似的BiFPN扩散架构,我们称之为Conditional-Mini-BiFPN,其具体的网络结构如上图所示。
对于一辆自动驾驶汽车而言,配备的自动驾驶采集传感器的性能至关重要,在自动驾驶车辆日常行驶的过程中,极有可能会出现相机传感器或者激光雷达传感器出现遮挡或者故障的问题,从而影响最终自动驾驶系统的安全性以及运行效率。基于这一考虑出发,我们提出了渐进式的传感器Dropout训练范式,用于增强提出的算法模型在传感器可能被遮挡等情况下的鲁棒性和适应性。
通过我们提出的渐进传感器Dropout训练范式,可以使得算法模型通过利用相机传感器以及激光雷达传感器采集到的两种模态数据的分布,重建缺失的特征,从而实现了在恶劣状况下的出色适应性和鲁棒性。具体而言,我们利用来自图像数据和激光雷达点云数据的特征,以三种不同的方式进行使用,分别是作为训练目标、扩散模块的噪声输入以及模拟传感器丢失或故障的条件,为了模拟传感器丢失或故障的条件,我们在训练期间逐渐将相机传感器或激光雷达传感器输入的丢失率从0增加到预定义的最大值a=25。整个过程可以用下面的公式进行表示:

其中,代表当前模型所处的训练轮数,通过定义dropout的概率用于表示特征中每个特征被丢弃的概率。通过这种渐进式的训练过程,不仅训练模型有效去噪并生成更具有表现力的特征,而且还最大限度地减少其对任何单个传感器的依赖,从而增强其处理具有更大弹性的不完整传感器数据的能力。

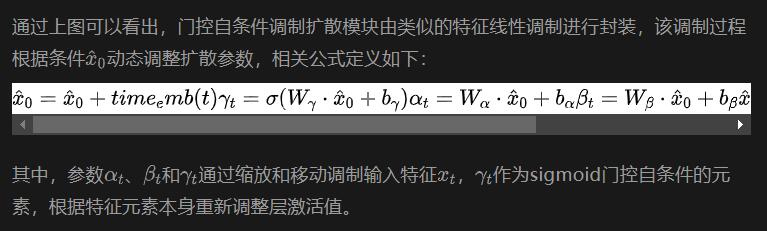
具体而言,门控自条件调制扩散模块的网络结构如下图所示
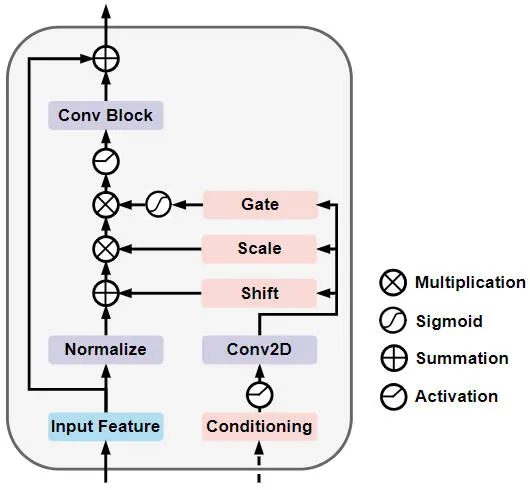
门控自条件调制扩散模块网络结构示意图
为了验证我们提出的算法模型DifFUSER在多任务上的感知结果,我们主要在nuScenes数据集上进行了3D目标检测以及基于BEV空间的语义分割实验。
首先,我们比较了提出的算法模型DifFUSER与其它的多模态融合算法在语义分割任务上的性能对比情况,具体的实验结果如下表所示:
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
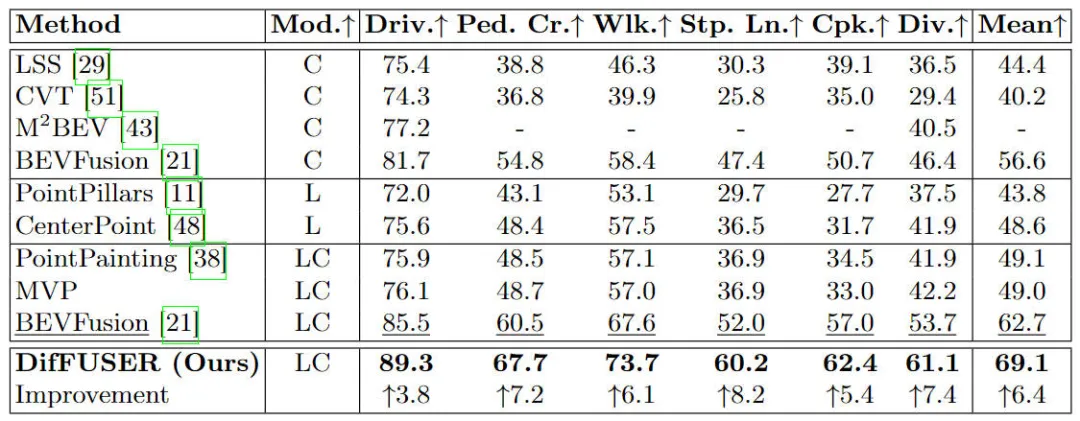 不同算法模型在nuscenes数据集上的基于bev空间的语义分割任务的实验结果对比情况
不同算法模型在nuscenes数据集上的基于bev空间的语义分割任务的实验结果对比情况
 FreeTTS
FreeTTS
FreeTTS是一个免费开源的在线文本到语音生成解决方案,可以将文本转换成MP3,
 231
查看详情
231
查看详情

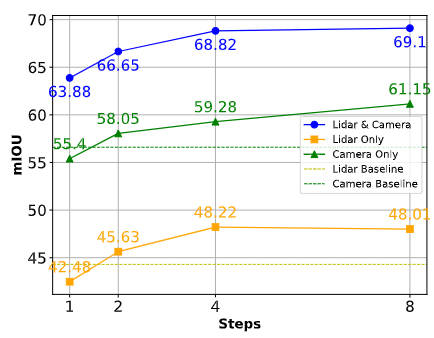
通过实验结果可以看出,我们提出的算法模型相比于基线模型而言在性能上有着显著的提高。具体而言,BEVFusion模型的mIoU值只有62.7%,而我们提出的算法模型已经达到了69.1%,具有6.4%个点的提升,这表明我们提出的算法在不同类别上都更有优势。此外,下图也更加直观的说明了我们提出的算法模型更具有优势。具体而言,BEVFusion算法会输出较差的分割结果,尤其在远距离的场景下,传感器错位的情况更加明显。与之相比,我们的算法模型具有更加准确的分割结果,细节更加明显,噪声更少。
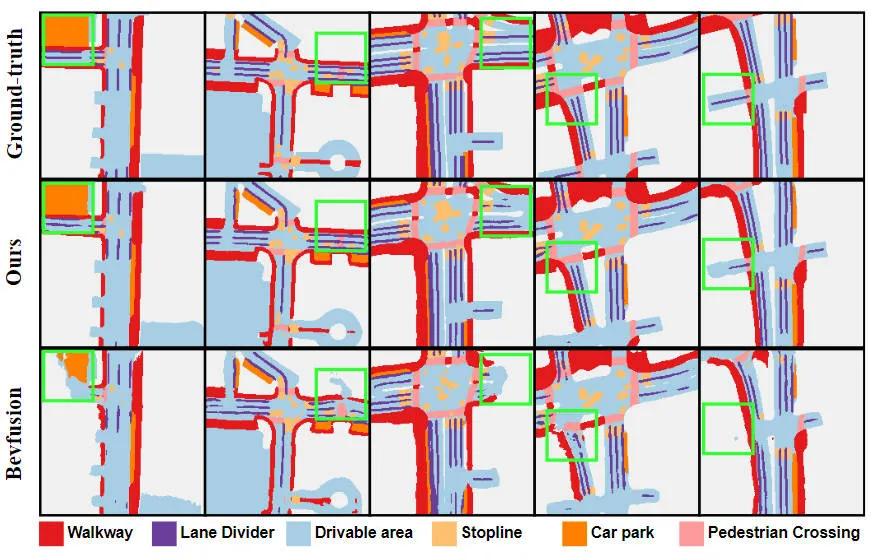
提出算法模型与基线模型的分割可视化结果对比
此外,我们也将提出的算法模型与其它的3D目标检测算法模型进行对比,具体的实验结果如下表所示
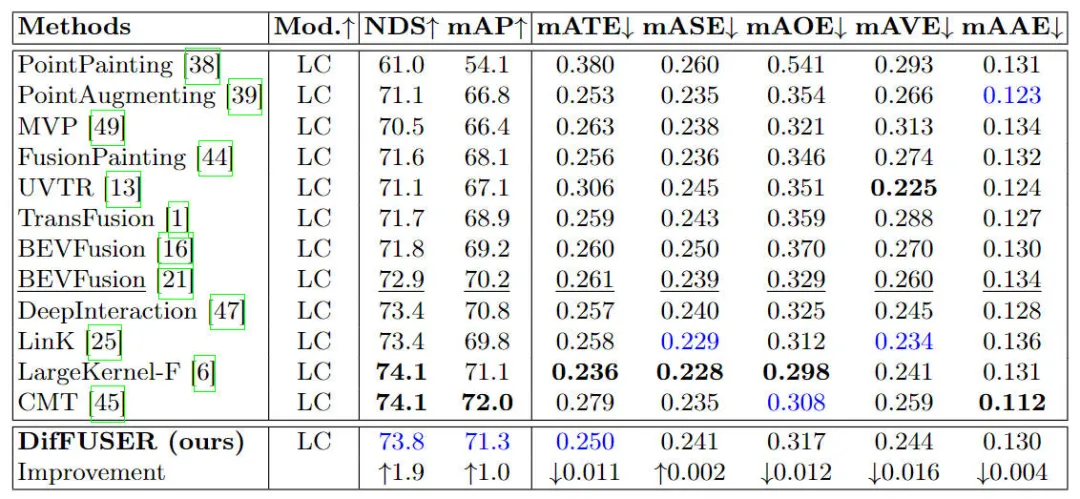
不同算法模型在nuScenes数据集上的3D目标检测任务的实验结果对比情况
通过表格当中列出的结果可以看出,我们提出的算法模型DifFUSER相比于基线模型在NDS和mAP指标上均有提高,相比于基线模型BEVFusion的72.9%NDS以及70.2%的mAP,我们的算法模型分别要高出1.8%以及1.0%。相关指标的提升表明,我们提出的多模态扩散融合模块对特征的减少和特征的细化过程是有效的。
此外,为了表明我们提出的算法模型在传感器故障或者遮挡情况下的感知鲁棒性,我们进行了相关分割任务的结果比较,如下图所示。
不同情况下的算法性能比较
通过上图可以看出,在采样充足的情况下,我们提出的算法模型可以有效的对缺失特征进行补偿,用于作为缺失传感器采集信息的替代内容。我们提出的DifFUSER算法模型生成和利用合成特征的能力,有效地减轻了对任何单一传感器模态的依赖,确保模型在多样化和具有挑战性的环境中能够平稳运行。
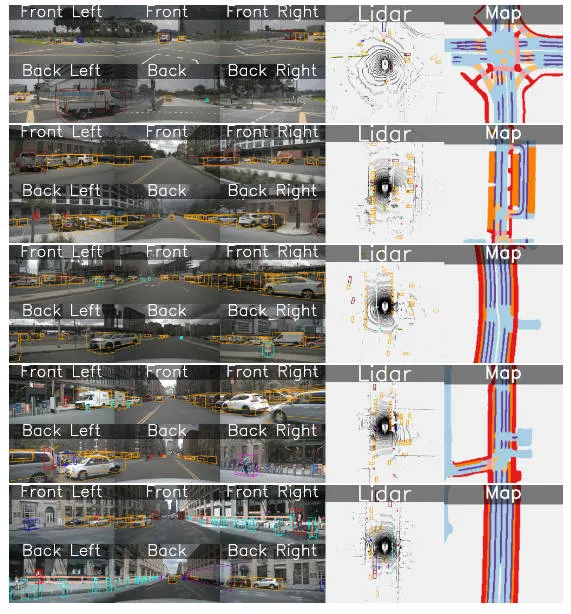
下图展示了我们提出的DifFUSER算法模型在3D目标检测以及BEV空间的语义分割结果的可视化,通过可视化结果可以看出,我们提出的算法模型具有很好的检测和分割效果。
本文提出了一个基于扩散模型的多模态感知算法模型DifFUSER,通过改进网络模型的融合架构以及利用扩散模型的去噪特性来提高网络模型的融合质量。通过在Nuscenes数据集上的 实验结果表明,我们提出的算法模型在BEV空间的语义分割任务中实现了SOTA的分割性能,在3D目标检测任务中可以和当前SOTA的算法模型取得相近的检测性能。
实验结果表明,我们提出的算法模型在BEV空间的语义分割任务中实现了SOTA的分割性能,在3D目标检测任务中可以和当前SOTA的算法模型取得相近的检测性能。
以上就是超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)的详细内容,更多请关注其它相关文章!
# 扩散模型
# 本溪seo服务方案招聘
# 北京综合网站建设设计
# 烟台网站排名推广
# 巢湖市场营销推广价格
# 奶茶微营销推广方案
# 曲靖网站建设协议
# 网站的推广负责人
# 湖北网站建设哪里办理
# 情况下
# 主要包括
# 可以实现
# 所示
# 提出了
# 可以看出
# 门控
# 模态
# 多模
# latte
# 子网
# 自动驾驶
# 珠宝行业微信推广营销
# 免费网站关键字推广
相关栏目:
【
Google疑问12 】
【
Facebook疑问10 】
【
优化推广96088 】
【
技术知识133117 】
【
IDC资讯59369 】
【
网络运营7196 】
【
IT资讯61894 】
相关推荐:
赋能金融新生态,多家银行创新应用成果亮相世界人工智能大会
新华三集团总裁兼首席执行官于英涛:人工智能时代需要想象力,更需要精耕务实
OpenAI夺冠:人工智能为云计算带来新变革
1000万张照片训练AI模型 科学家找到水下定位新方法
导演郭帆:人工智能应用可能会影响《流浪地球 3》的创作开发
再度重仓 AI 赛道,SaaS 巨头 Salesforce 扩大 AIGC 风投基金规模
「模仿学习」只会套话?解释微调+130亿参数Orca:推理能力打平ChatGPT
图灵奖得主Hinton:我已经老了,如何控制比人类更聪明的AI交给你们了
鉴智机器人发布基于地平线征程5的标准视觉感知产品
技术如何使人变得懒惰?
智能电网技术:提高能源效率和可靠性
OpenAI更新GPT-4等模型,新增API函数调用,价格最高降75%
创新科学家成功研发FAST激光靶标维护机器人
国内首款大尺寸仿鸵双足机器人“大圣”亮相,穿戴红色战袍
华为云盘古大模型3.0发布 AI云服务同时上线:200亿亿次性能
2025年的网络分区:人工智能和自动化如何改变事物
6月14日《星空下的对话》 张朝阳陆川将畅聊人生、电影、心理学与AI
字节团队提出猞猁Lynx模型:多模态LLMs理解认知生成类榜单SoTA
抖音在Android平台获得VR|直播|软件著作权
OpenAI限制网络爬虫访问以保护数据免被用于AI模型训练
MetaGPT AI 模型开源:可模拟软件公司开发过程,生成高质量代码
郭帆导演成功利用AI技术制作的《流浪地球3》预告片在央视热播,引发巨大反响
笔神作文声讨学而思AI大模型 称用“爬虫”技术盗取数据
天翼云在国际AI顶会大模型挑战赛中获得冠军
硅谷人工智能研究院创始人皮埃罗·斯加鲁菲:Transformer模型演讲
一公司推出喷火机器狗,可喷出 9 米长火焰
讯飞星火大模型实现升级 助力通用人工智能人才培养
360发布认知型通用大模型“360智脑4.0” 全面接入360全家桶
“上海市民营企业人工智能赋能创新中心”揭牌成立
改变城市交通:智慧城市中的智能交通
自己动手使用AI技术实现数字内容生产
马克龙密会AI专家,法国加入全球人工智能竞赛
官宣!爱康AI未来之夜三大亮点提前剧透!
原小米 9 号员工李明打造全球首款 AI 安卓桌面机器人
“长沙造”无人机,领先的不止植保
英伟达H100霸榜权威AI性能测试 11分钟搞定基于GPT-3的大模型训练
百川智能发布Baichuan-13B AI模型,号称“130亿参数开源可商用”
Meta Quest订阅服务每月7.99美元畅玩两款VR游戏应用
普林斯顿大学推出Infinigen AI模型 可生成真实自然环境 3D场景
AYANEO 安卓掌机 Pocket AIR 配置公布:天玑 1200 + 5.5 英寸屏
人工智能“Aria”现身 Opera浏览器100版本更新:新功能“标签岛”
J*a与人工智能结合:构建智能云服务
苹果头显降临,AI虚拟人的救星还是流星?
从医疗康复外骨骼到通用人形机器人,傅利叶智能推动核心技术升级
探展WAIC | 第四范式“式说”聚焦toB大模型,布局生成式AI重构企业软件
警惕!AI或致虚假信息泛滥
央视报道!星纪魅族集团车载人机交互技术成世界移动通信大会焦点
码刻 | 48小时Hackathon,源码见证新生代AI创新的发生
基于信息论的校准技术,CML让多模态机器学习更可靠
三个全球首创,青岛西海岸新区“海元宇宙”亮相世界人工智能大会
2024-04-22

运城市盐湖区信雨科技有限公司是一家深耕海外推广领域十年的专业服务商,作为谷歌推广与Facebook广告全球合作伙伴,聚焦外贸企业出海痛点,以数字化营销为核心,提供一站式海外营销解决方案。公司凭借十年行业沉淀与平台官方资源加持,打破传统外贸获客壁垒,助力企业高效开拓全球市场,成为中小企业出海的可靠合作伙伴。
